Scene 1 (0s)
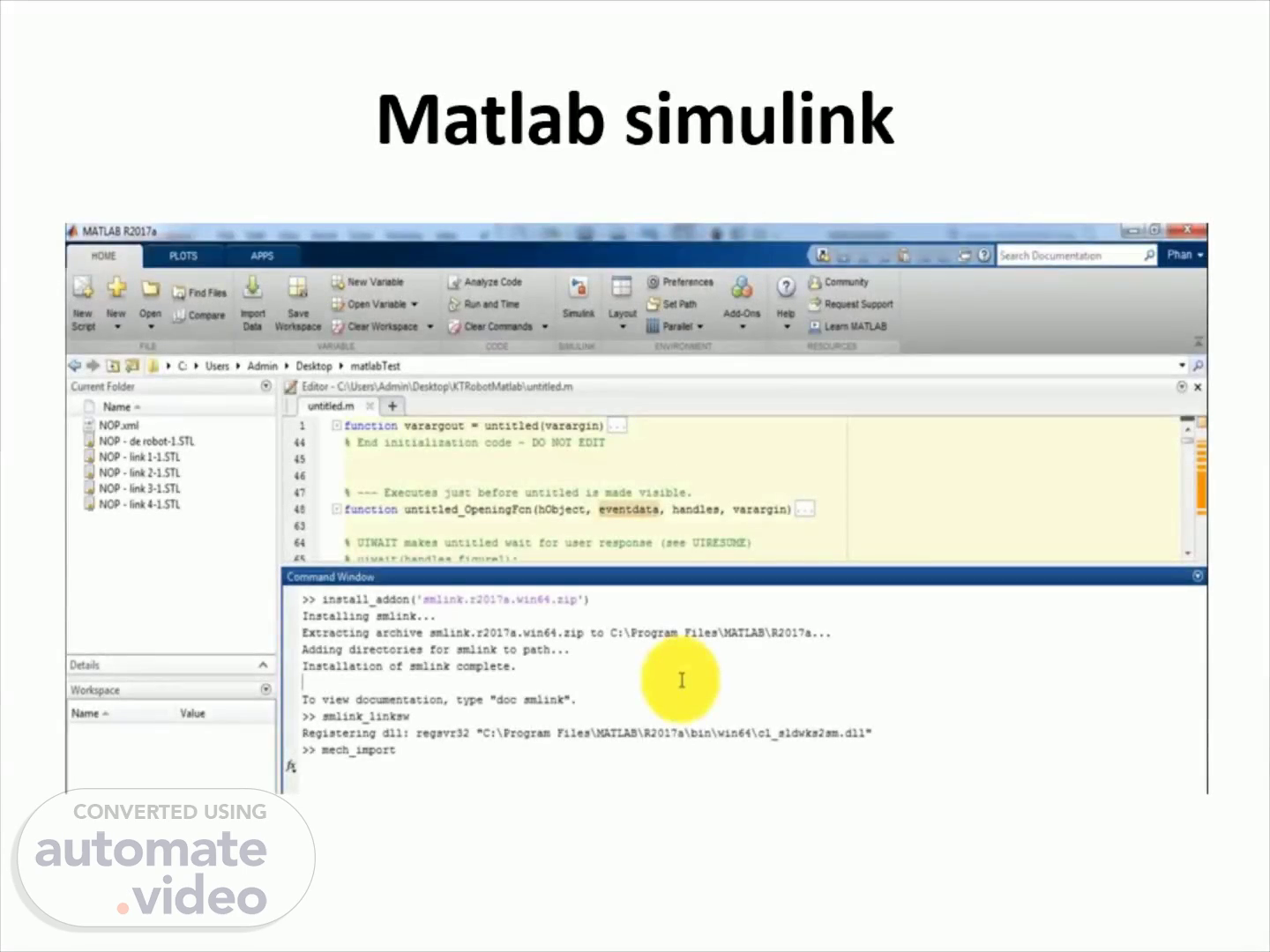
Matlab simulink. @'unct - robot-ISIL - bnk1-1.STL.
Scene 2 (9s)
block diagram without join actuator. .
Scene 3 (20s)
block diagram with join actuator to control the motion of shoulder, elbow and wrest.
Matlab simulink. @'unct - robot-ISIL - bnk1-1.STL.
block diagram without join actuator. .
block diagram with join actuator to control the motion of shoulder, elbow and wrest.